Tue 28 March 2017
By Brendan
In Highlights.
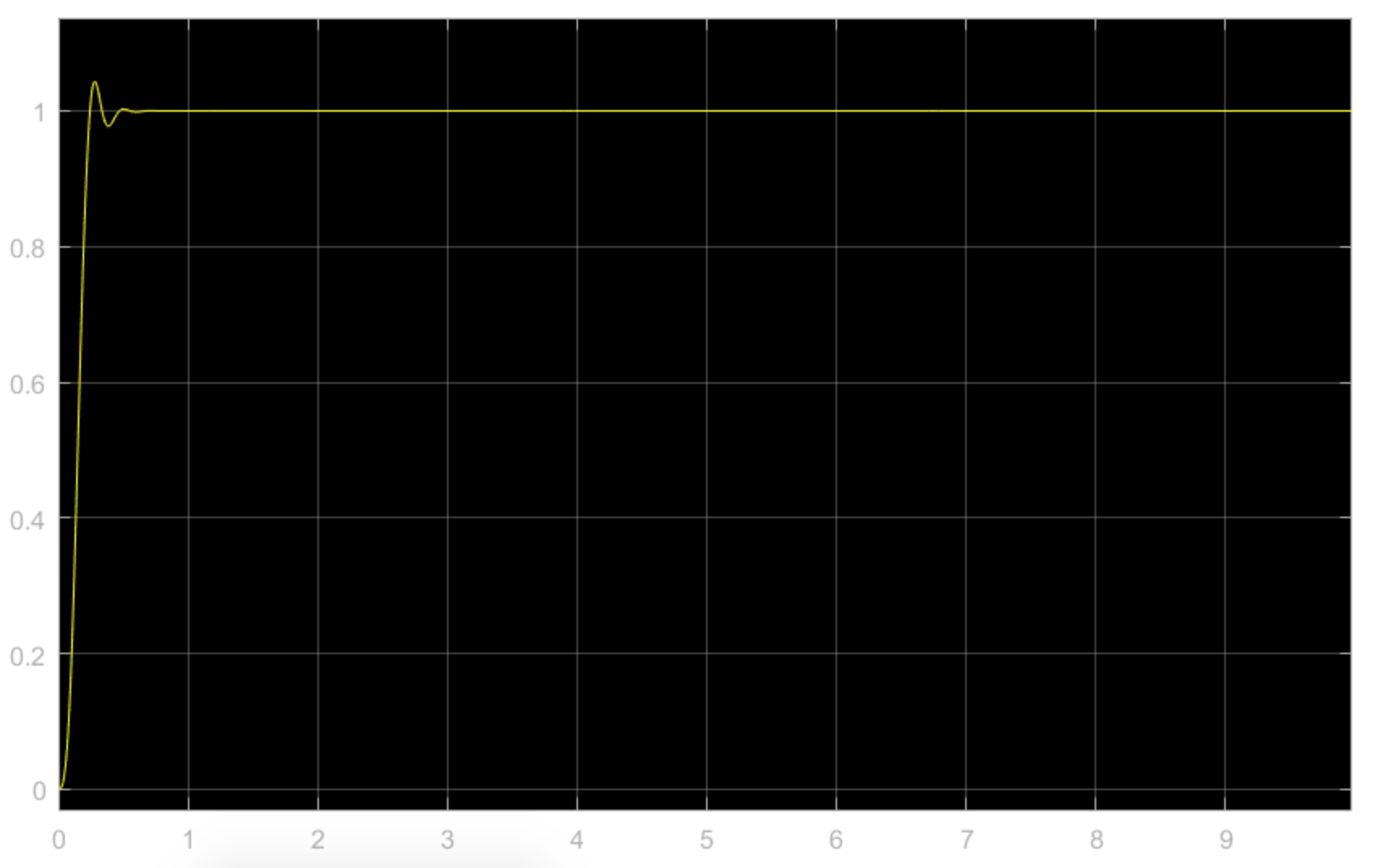
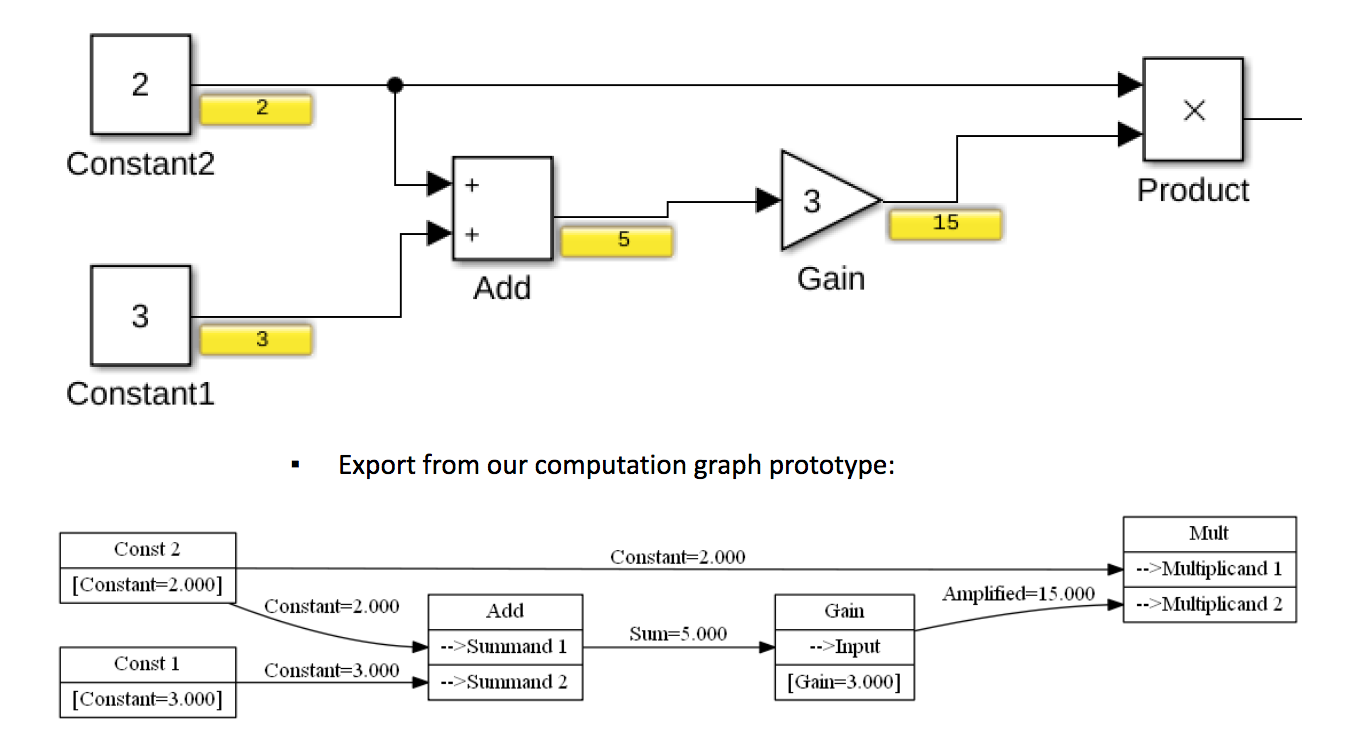
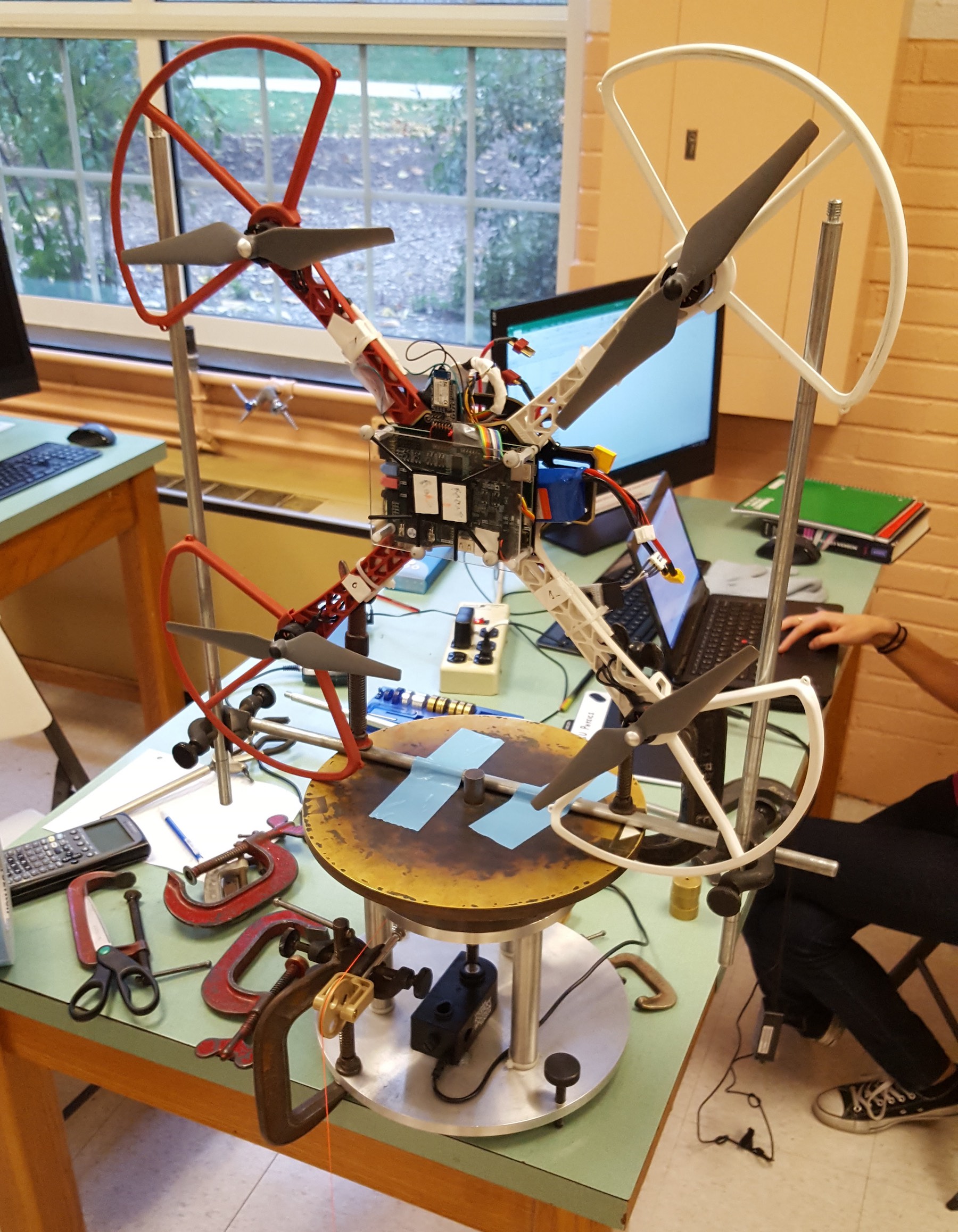
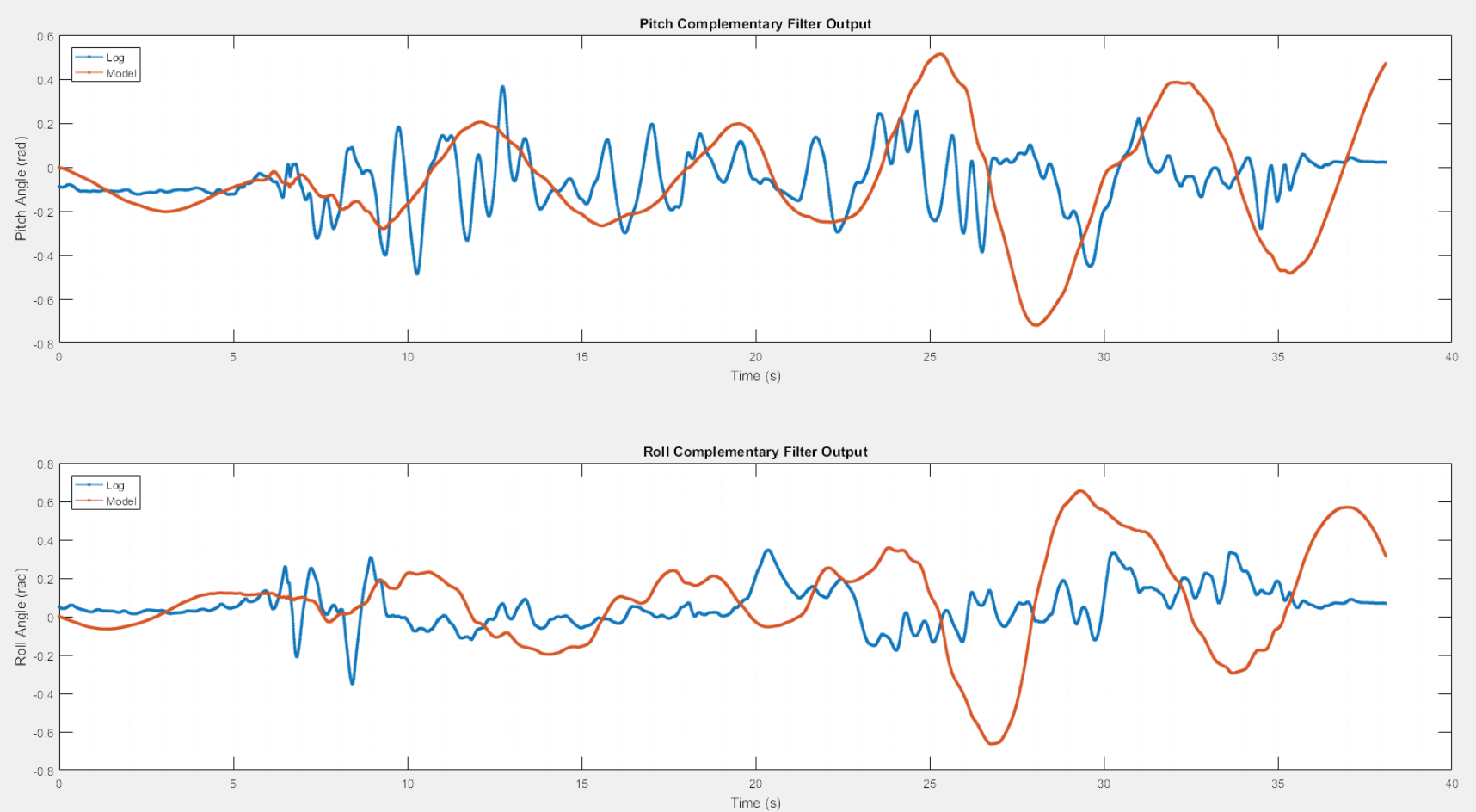
David, Andy, and Tara have been trying to track down discrepancies between the quadcopter controller implementation and the Simulink model. With each discovered discrepancy, the model keeps getting better. Here is one example of where the quad code and model were performing the calculation for the complementary filter differently.
This …