Tue 29 November 2016
By Brendan
In Highlights.
Jake and Kris have continued their work on the command line interface and have provided another sample of the most recent CLI functionality.
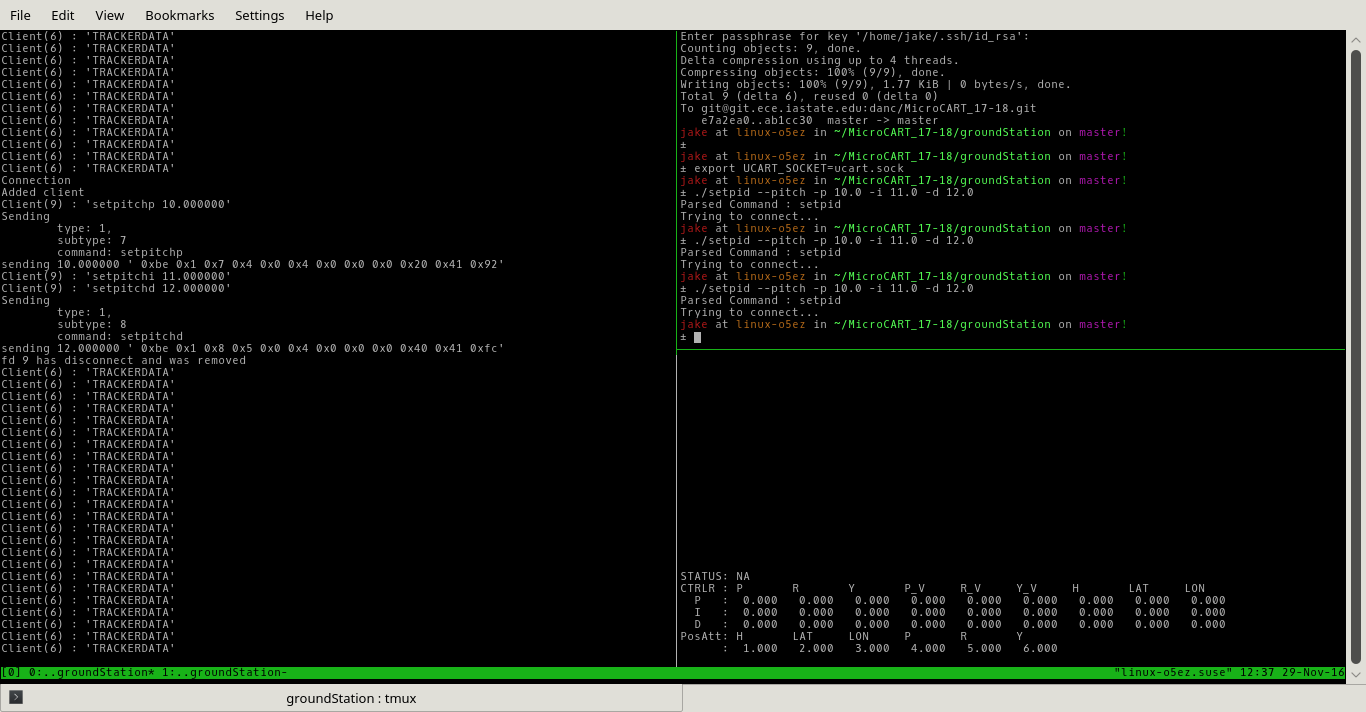
This example shows some of the commands used to control the PID constants of the quadcopter. On the right top are the commands being executed; on the left is the backend daemon; and on the right bottom is a continuously running monitor that refreshes 10 times per second.